

 如果结果不匹配,请
如果结果不匹配,请 
 更多“所谓起跑技术,就是在最短时间内,完成从自由滑进到较高速度的…”相关的问题
更多“所谓起跑技术,就是在最短时间内,完成从自由滑进到较高速度的…”相关的问题
A.需要患者在最短时间内做出回答,否则影响评估结果
B.在适当的时间和安全环境中进行,评估从简单容易的项目开始,逐渐过渡到较复杂困难的项目
C.尽量以直接观察法为主,在评估一些不便完成或较难控制的动作时,可询问患者或家属
D.评估患者的真实能力,应记录“患者能做什么”,只要患者无需他人帮助,虽用辅助器也可归类为自理
E.评估结果反映患者24h内完成情况
点到某一指定顶点v的最短路径,例如,对于图8-47(a)所示的带权有向图,用该算法求得的从各顶点到顶点2的最短路径如图8-47(b)所示.
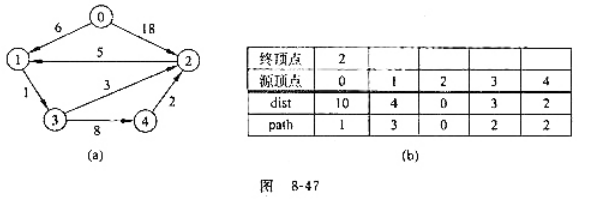
关于最短路径的读法以顶点0为例,在从顶点0到顶点2的最短路径上,顶点0的后继为顶点1(即path[0]=1),顶点1的后继为顶点3(即path[1]=3),顶点3的后继顶点为2(即path[3]=2).
编写一个算法,求解一个带权有向图的单目标最短路径问题。假设图G的顶点数据的类型为char,边上权值的数据类型为float。
所谓半无穷范围查询(semi-infinite range query),是教材8.4节中所介绍一般性范围查询的特例,具体地,这里的查询区域是某一侧无界的广义矩形区域,比如R=[-1,+1]x[0,﹢∞),即是对称地包含正半y坐标轴、宽度为2的一个广义矩形区域,当然,对查询的语义功能要求依然不变——从某一相对固定的点集中,找出落在任意指定区域R内部的所有点。
范围树(176页习题[8-20])稍作调整之后,固然也可交持半无穷范围查询,但若能针对这一特定问题所固有的性质,改用优先级搜索树(priority search tree,PST)之类的数据结构,则不仅可以保持O(r+logn)的最优时间效率,而且更重要的是,可以将空间复杂度从范围树的O(nlogn)优化至O(n)。
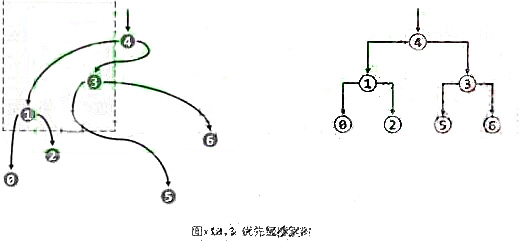
如图x10.3所示,优先级搜索树除了首先在拓扑上应是一棵二叉树,还同时遵守以下三条规则。
①首先,各节点的y坐标均不小于其左右孩子(如果存在)——因此,整体上可以视作为以y坐标为优先级的二叉堆。
②此外,相对于任一父节点,左子树中节点的x坐标均不得大于右子树中的节点。
③最后,互为兄弟的每一对左、右子树,在规模上相差不得超过一。
a)试按照以上描述,用C/C++定义并实现优先级搜索树结构;
b)试设计一个算法,在O(nlogn)时间内将平面上的n个点组织为一棵优先级搜索树;
c)试设计一个算法,利用已创建的优先级搜索树,在O(r+logn)时间内完成每次半无穷范围查询,其中r为实际命中并被报告的点数。
















