题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
两个矩阵相乘前将第二个矩阵转置,是使用利用数据访问的()达到更高的cache命中率。
A.时间局部性
B.空间局部性
C.计算局部性
D.混合局部性
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.时间局部性
B.空间局部性
C.计算局部性
D.混合局部性
如果结果不匹配,请 联系老师 获取答案
 更多“两个矩阵相乘前将第二个矩阵转置,是使用利用数据访问的()达到…”相关的问题
更多“两个矩阵相乘前将第二个矩阵转置,是使用利用数据访问的()达到…”相关的问题
A.时间局部性
B.空间局部性
C.计算局部性
D.混合局部性
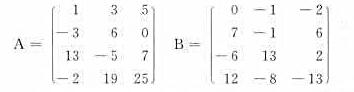
矩阵 的每一个行向量的转置都是方程组
的每一个行向量的转置都是方程组
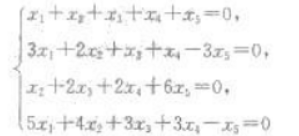
的解向量,问这4个行向量的转置能否构成方程组的基础解系,若不能,这四个行向量是多了,还是少了?若多了,如何去掉,若少了,又如何补充?
矩阵管理制的特征是()。
A.工作人员属于两个领导部门,其从属具有多重性
B.具有较大的灵活性、适应性
C.公司的决策权下放,最高管理层摆脱了日常事务
D.为各级领导没置职能部门并发挥其专业管理的作用
class Matrix {
public:
Matrix(int row,int col); // 构造一个具有row 行col 列的矩阵
~Matrix() {delete []mem;} // 析构函数
friend bool Multiply(Matrix &m1, Matrix &m2, Matrix &m3);
// 定义Multiply() 为友元函数,该函数把m1×m2的值赋给m3
// 其他成员函数从略
private:
int *mem; // 动态申请矩阵空间
const int rows,cols; // 矩阵的行数和列数
};
Matrix::Matrix(int row,int col):rows(row),cols(col)
{
mem = new int[row*col];
}
bool Multiply(Matrix &m1, Matrix &m2, Matrix &m3)
{
// 确定矩阵是否能够进行相乘
if(m1.rows != m3.rows ||m2.cols != m3.cols || m1.cols != m2.rows) return false;
// 定义sum变量,用于计算乘积矩阵m3中每个元素的值
int sum;
// 请在下面编写剩余部分
}







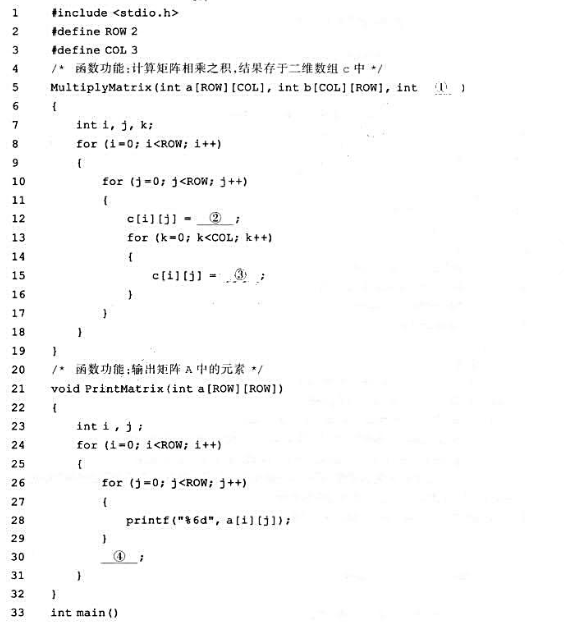
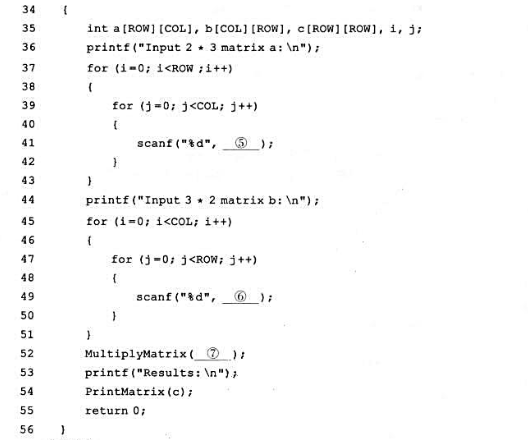
 , 编程计算mxn阶矩阵A和n×m阶矩阵B之积
, 编程计算mxn阶矩阵A和n×m阶矩阵B之积