如果结果不匹配,请
如果结果不匹配,请 
 更多“盾构机常见的两种形式盾体铰接形式为______和______…”相关的问题
更多“盾构机常见的两种形式盾体铰接形式为______和______…”相关的问题
第2题
以下关于棘轮的说法正确的是()
A.棘轮机构是由主动件1、驱动棘爪2、棘轮 3、止动爪4以及机架等构件组成
B.棘轮机构有外啮合和内啮合两种形式
C.当主动件1顺时针摆动时,止动爪4阻止棘轮反向转动,此时棘爪2在棘轮的齿背上滑过并落入棘轮3的另一齿内,棘轮静止不动
D.当主动件1逆时针摆动时,主动件上铰接的棘爪2插入棘轮3的齿内,推动棘轮同向转动一定角度
第7题
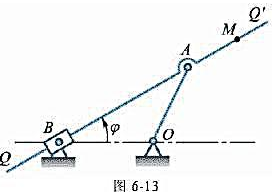
如图6-13所示螺线画规的杆和曲柄OA铰接,并穿过固定于点B的套筒。取点B为极坐标系的极点,直线BO为
如图6-13所示螺线画规的杆 和曲柄OA铰接,并穿过固定于点B的套筒。取点B为极坐标系的极点,直线BO为极轴,已知极角φ=kt(k为常数),BO=AO=a,AM=b。试求点M的极坐标形式的运动方程、轨迹方程以及速度和加速度的大小。
和曲柄OA铰接,并穿过固定于点B的套筒。取点B为极坐标系的极点,直线BO为极轴,已知极角φ=kt(k为常数),BO=AO=a,AM=b。试求点M的极坐标形式的运动方程、轨迹方程以及速度和加速度的大小。