

 如果结果不匹配,请
如果结果不匹配,请 
 更多“应用地形图可以确定出()。”相关的问题
更多“应用地形图可以确定出()。”相关的问题
第4题
设为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)为不同的三点l)确定线段P1P2
设 为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)为不同的三点
为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)为不同的三点
l)确定线段P1P2的中点坐标:
2)若P1,P2,P3不共线,试证△P1P2P3的重心的坐标为
(注:设Pi(xi,yi,zi),i=1,2....n.则由坐标

所确定的点P称为Pi(1≤i≤n)的重心.)
第5题
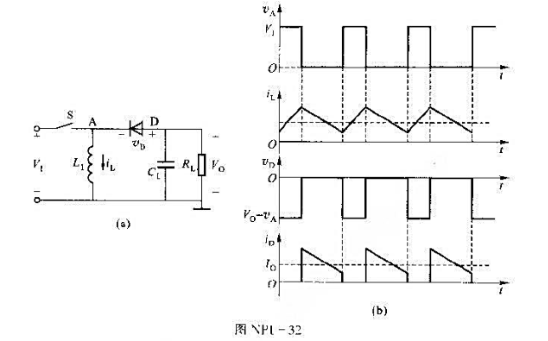
试两出图NP1-32(a)所示降压一升压型变换电路中达到稳定时vA、vD、iL、iD、I0
试两出图NP1-32(a)所示降压一升压型变换电路中达到稳定时vA、vD、iL、iD、I0
点击查看答案
各点电压、电流波形(坐标对齐)。设VD(on)=0。
第6题
在右手直角坐标系σ1={O;e1,e2,e3}中,已给三个互相垂直的平面:x+y+z-1=0,:x-z+
在右手直角坐标系σ1={O;e1,e2,e3}中,已给三个互相垂直的平面 :x+y+z-1=0,
:x+y+z-1=0, :x-z+1=0,
:x-z+1=0, :x-2y+z+2=0.确定新的坐标系
:x-2y+z+2=0.确定新的坐标系 ,使得,,分别为
,使得,,分别为 坐标面,且O在新坐标系的第一卦限内,求σ1到σ2的点的坐标变换公式.
坐标面,且O在新坐标系的第一卦限内,求σ1到σ2的点的坐标变换公式.
第8题
问题描述:欧氏旅行售货员问题是对给定的平面上n个点确定一条连接这n个点的长度最短的哈密顿回
路.欧氏距离满足三角不等式,所以欧氏旅行售货员问题是一个特殊的具有三角不等式性质的旅行售货员问题,仍是一个NP完全问题.最短双调TSP回路是欧氏旅行售货员问题的特殊情况.平面上n个点的双调TSP回路是从最左点开始,严格地由左至右直到最右点,然后严格地由右至左直至最左点,且连接每个点恰好一次的条闭合回路.
点击查看答案
算法设计:给定平面上n个点,计算这n个点的最短双调TSP回路.
数据输入:由文件input.txt给出输入数据.第1行有1个正整数n,表示给定的平面上的点数.在接下来的n行中,每行2个实数,分别表示点的x坐标和y坐标.
结果输出:将计算的最短双调TSP回路的长度(保留2位小数)输出到文件output.txt.
第9题
以下关于AutoCAD软件LINE命令的解释,正确的是()
A.LINE所画的线相当于由PLINE画的宽度等于0的线
B.LINE命令后不仅能输入点的坐标,而且能输入文字如U等
C.LINE命令后可以使用如点的捕捉、正交模式等辅助命令
D.LINE命令可以绘制轴测图
第11题
已知图示机构的尺寸和原动件1以等角速度ω1逆时针转动,试确定其滑块2上D点的速度方向,其正确确定方法及结果为()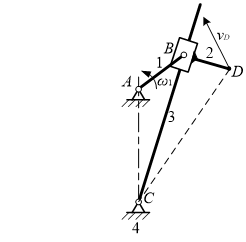
A.D点的速度方向应平行于BC方向,指向向上(图中未示出)
B.滑块2上的D点绕C点转动, 其D点的速度方向为垂直于CD连线(图中虚线),指向为逆时针方向;
C.如题图上vD所示方向
D.因缺条件,D点的速度方向无法作图确定
















