题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
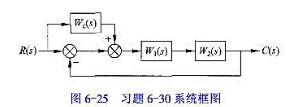
设复合控制系统的方框图如图6-25所示,其中前馈补偿装置的传递函数为。式中,T为已知常数,。试确
设复合控制系统的方框图如图6-25所示,其中前馈补偿装置的传递函数为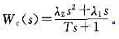 。式中,T为已知常数,
。式中,T为已知常数, 。试确定使系统等效为II型系统时的λ1和λ2的数值。
。试确定使系统等效为II型系统时的λ1和λ2的数值。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设复合控制系统的方框图如图6-25所示,其中前馈补偿装置的传递函数为。式中,T为已知常数,。试确定使系统等效为II型系统时的λ1和λ2的数值。
如果结果不匹配,请 联系老师 获取答案
 更多“设复合控制系统的方框图如图6-25所示,其中前馈补偿装置的传…”相关的问题
更多“设复合控制系统的方框图如图6-25所示,其中前馈补偿装置的传…”相关的问题
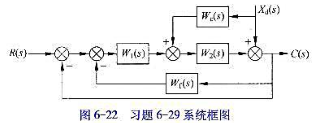
设复合控制系统的方框图如图6-22所示,其中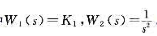 。试确定Wc(s)、W1(s)及K1使系统的输出完全不受扰动的影响,且单位阶跃响应的超调虽σ%=25%,调节时间tc=4s
。试确定Wc(s)、W1(s)及K1使系统的输出完全不受扰动的影响,且单位阶跃响应的超调虽σ%=25%,调节时间tc=4s
控制系统方框图如图3-4所示。试求:
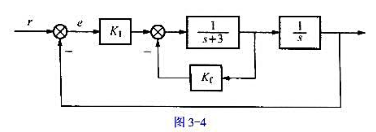
(1)当K1=25和Kt=0时,系统的阻尼系数ξ,无阳尼自然振荡频率ωn以及系统对单位斜坡输入的稳态
误差ess;
(2)当K1=25和Kt=4时重复(1)的要求;
(3)要使系统的阻尼系数ξ=0.7,在单位斜坡输入信号作用下系统的稳态误差ess=0.1。试确定K1和Kt的数值,并计算在此参数情况下,系统单位阶跃响应的超调虽,上升时间和调整时间。
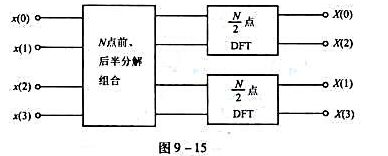
如图10-21所示信号流图的数字滤波器,试求:
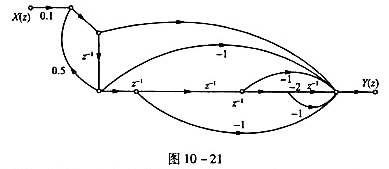
(1)它的系统函数H(z)及其收敛域,并画出它用一个一阶全通滤波器和一个4阶FIR滤波器的级联实现的方框图或信号流图;
(2)大概画出该数宇滤波器的幅频响应 .
.
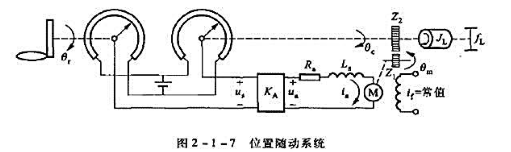
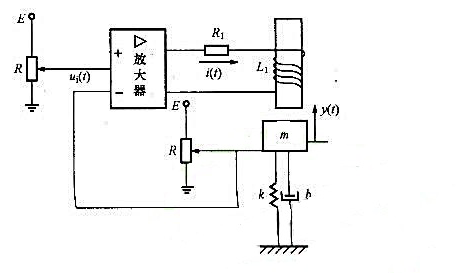
如图1-1所示的机电系统中,路(t)为输入电压: y(t)为输出位置,R1和L1分别为电磁线圈的电阻与电感;m为衔铁的质量;k为弹簧的弹性系数;b为阻尼器的阻尼系数;放大器的增益为A1。假设电磁线圈对衔铁m产生的作用力为f=kti(t);电磁线圈的反电动势为 , 画出系统的原理方框图,并简要说明其工作原理。
, 画出系统的原理方框图,并简要说明其工作原理。
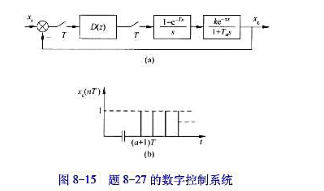
结构如图8-15(a)所示的数字控制系统。其中,τ-aT,a为正整数,T为采样周期。
试设计数字控制器D(z),使系统在单位阶跃输入作用下,输出量Xt(nT)满足图8-15(b)所示的波形。
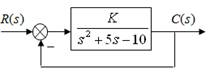
控制系统如题图所示,试作复合校正设计,使得

(1)系统的超调量Mp<20%,确定前向增益值K。
(2)设计输入补偿器Gr(s),使得该系统可以实现II型精度。