题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
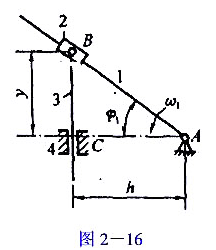
在图2-16所示的正切机构中,已知1=30°,构件1的等角速度1=6rad/s,h=400mm,试用解析法求构件3的
在图2-16所示的正切机构中,已知 1=30°,构件1的等角速度
1=30°,构件1的等角速度 1=6rad/s,h=400mm,试用解析法求构件3的速度和加速度.
1=6rad/s,h=400mm,试用解析法求构件3的速度和加速度.
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在图2-16所示的正切机构中,已知1=30°,构件1的等角速度1=6rad/s,h=400mm,试用解析法求构件3的速度和加速度.
如果结果不匹配,请 联系老师 获取答案
 更多“在图2-16所示的正切机构中,已知1=30°,构件1的等角速…”相关的问题
更多“在图2-16所示的正切机构中,已知1=30°,构件1的等角速…”相关的问题
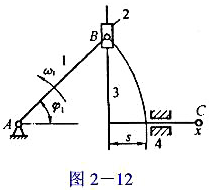
在图2-12所示正弦机构中,已知曲柄AB的等角速度为 1=20rad/s,lAB=100mm,
1=20rad/s,lAB=100mm, 1=45°,试用解析法求构件3的速度和加速度.
1=45°,试用解析法求构件3的速度和加速度.
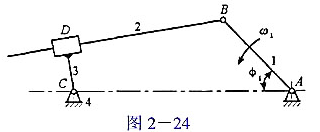
在图2-24示机构中,已知lAB=30mm,lAC=70mm,lCD=15mm,匀角速 1=10rad/s,转向如图2-25所示,
1=10rad/s,转向如图2-25所示, 1=45°.
1=45°.
(1)取u1=1mm/mm,绘机构运动简图;
(2)用相地运动图解法求构件3的角速度3和角速度 3.
3.
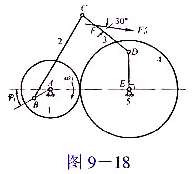
在图9-18所示机构中,已知:两齿轮的模数m=2mm,z1=38,z4=64,a=20°.
AB=25mm,lBC=127mm,lCD=76mm,lDE=50mm,φ1=30°.设ω1为顺时针方向.设作用在构件3上的总惯性力F´a=450N,lCF=20mm.其余构件上的惯性力以及各构件的重力均忽略不计.求需加于构件1上的平衡力偶矩和各运动副中的反力.
在图8-7a和图8-7b所示的2种机构中,已知O1O2=a=200mm,ω1=3rad/s。求图示位置时杆O2A的角速度。
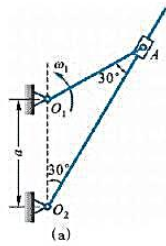
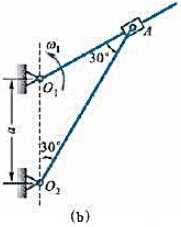
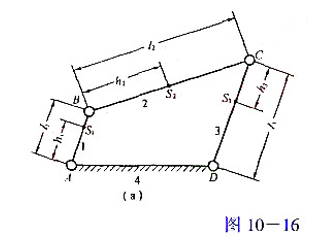
图10-16(a)所示铰链四杆机构中,已知构件1、2、3的长度为:l1=100mm,l2=300mm,l3=200mm;质量为:m1=1kg,m2=3kg、m3=2kg;其质心S1,S2,S3,的位置尺寸分别为:h1=75mm,h2=150mm,h3=120mm.今要求该机构达到惯性力完全平衡,试设计增加平衡质量的方案,并计算它们质径积的大小和方位.
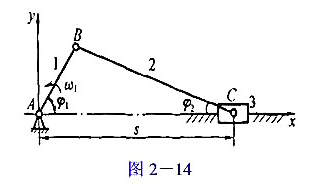
在图2-14所示曲柄滑块机构中,已知lAB=100mm,lBC=330mm,n1=1500r/min, 1=60°,试用解析法求滑块的速度和加速度.
1=60°,试用解析法求滑块的速度和加速度.
在图2-13所示的五杆机构中,已知各构件尺寸(尺寸比例尺u1=0.001m/mm)和1、4的大小和方向.试用作图法分析构件2的角速度2和角加速度 2.
2.

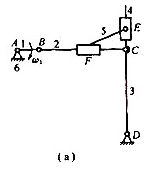
=30°, 1=100rad/s,试求角速度 5、速度vE4、角速度a5、角加速度aE4.
1=100rad/s,试求角速度 5、速度vE4、角速度a5、角加速度aE4.
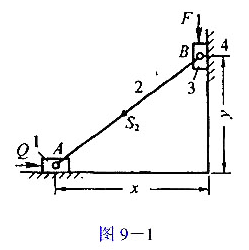
在图9-1所示机构中,已知:x=250mm,y=200mm,lAS2=128mm,F为驱动力,Q为有效阻力.m1=m3=2.75kg,m2=4.59kg,Js2=0.0l2kg·m2,又原动件3以等速v=5m/s向下移动,试确定作用在各构件上的惯性力.